Accurate quantitative estimation of tissue mechanical properties is a research topic. In order for the measurement to be clinical viable, it should be achieved in a non-invasive manner. The estimation of bone density from clinical CT images was reported in 2010 [1]. We are investigating the application of computational intelligent methods on multimodal medical data to aid in the estimation of bone material properties from images. This research has led to the development of opportunistic screening for detection and management of osteopenia [2][3].
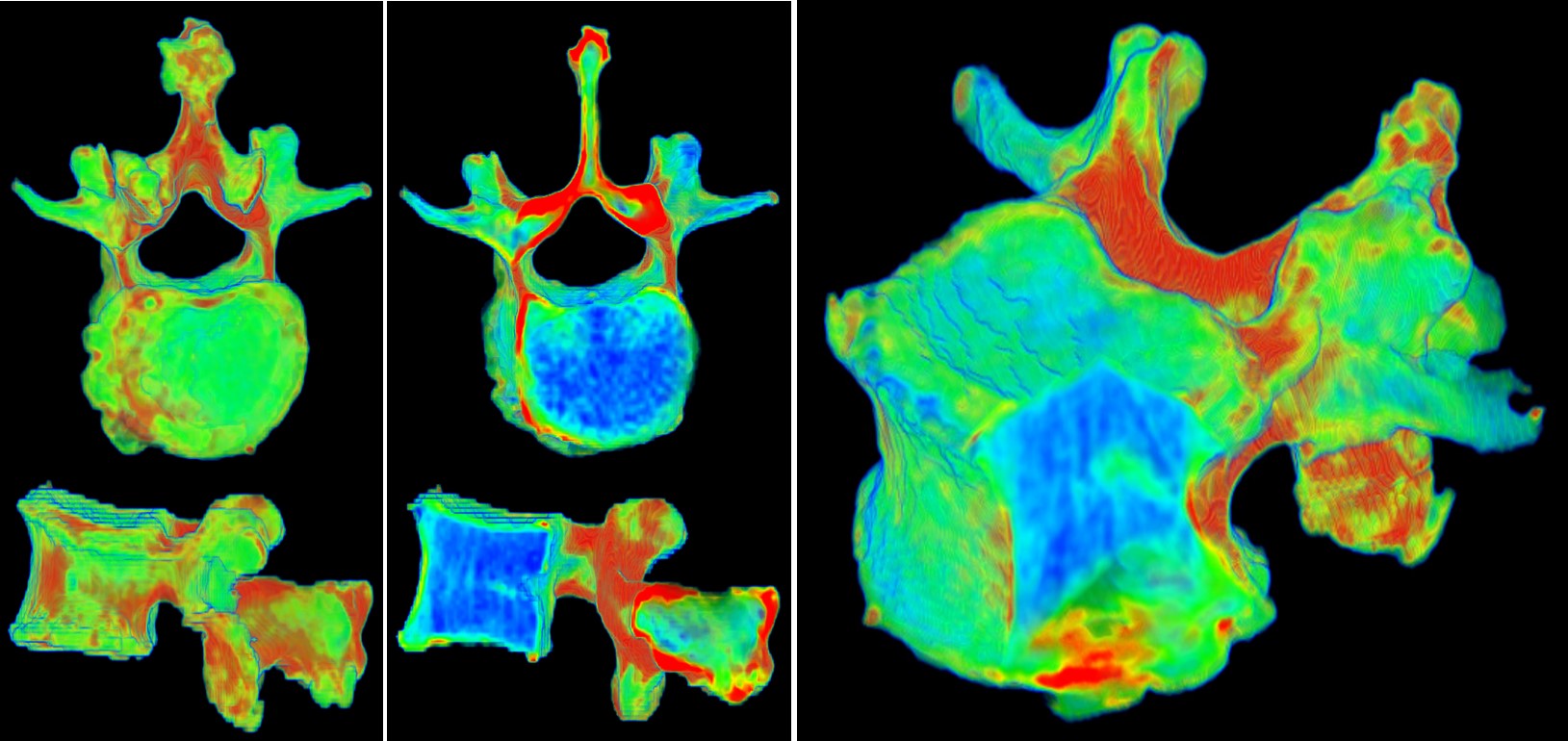
There are limited studies on visualization of tissue mechanical properties. However, a visually informative map of the spine (spine invasive map) could provide clinicians with an intuitive representation of the underlying bone properties. Visualization of bone properties can be achieved using material-sensitive transfer functions and coloring schemes that represent different properties:
A clustering-based framework for automatic generation of transfer functions for medical visualization was reported in [4].
References:
[1] Zhang, J, CH Yan, CK Chui and SH Ong, “Accurate measurement of bone mineral density using clinical CT imaging with single energy beam spectral intensity correction”. IEEE Transactions on Medical Imaging, 29, 7 (2010): 1382-1389.
[2] Tay, WL, CK Chui, SH Ong and ACM Ng, “Osteopenia screening using areal bone mineral density estimation from diagnostic CT images”. Academic Radiology, 19, no. 10 (2012): 1273-1282.
[3] Tay, WL, CK Chui, SH Ong and ACM Ng, “Ensemble-based regression analysis of multimodal medical data for ostopenia diagnosis”. Expert Systems with Applications, 40, no. 2 (2013): 811-819.
[4] Nguyen, BP, WL Tay, CK Chui and SH Ong, “A Clustering-Based System to Automate Transfer Function Design for Medical Image Visualization”. Visual Computer, 28, no. 2 (2012): 181-191.